Walking Robot Design Project
Completed: April 2018
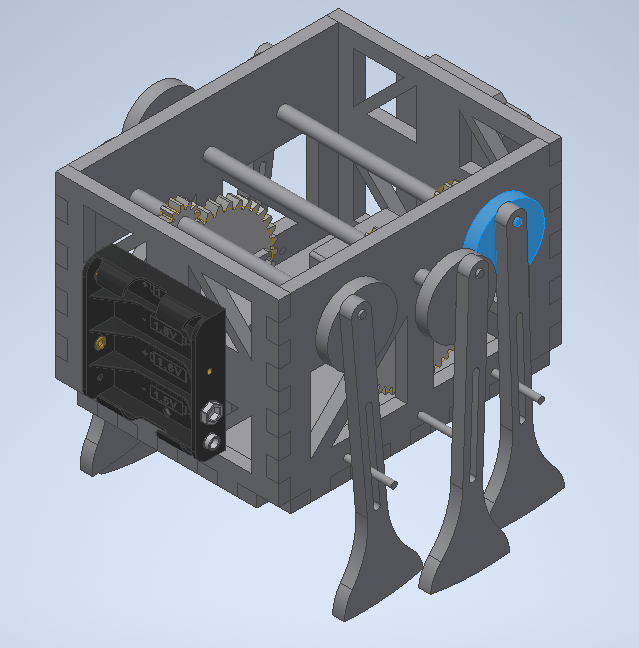
CAD of walking robot
This was my second-year design course project. The goal of the project was to design a moving robot that didn’t use wheels. The movement would be driven by motors, but we had to create an alternative mechanism for the robot to move. The robot have to walk a course that had obstacles of an unknown height.
My group decided to try rotating legs using a gear train to allow the robot to move. The robot was created using acrylic, 3d printer parts, and a wooden dowel for the axles.
The robot did not work. It had a variety of issues, but they are all important learning lessons. We decided to make the front legs move more slowly than the rear two. In our minds, this would make the front legs have a higher torque than the rest of the legs, which would allow the robot to climb objects better. However, we forgot one crucial detail. All the legs are on the same gear train transmission. In reality, all the slower legs did was put the robot out of balance and cause it to fall over. We would have been better off making all the legs move at the same speed. Our design also didn’t consider how the electronics would be secured, and we just let them sit freely in the box.
I still learned from this project. This sounds very basic, but for a group of student who never really built anything it meant a lot. First, iterate and test. We could have tested our idea before making the robot, we would have seen that it didn’t work. We relied a lot on glue when really fasteners are obviously the correct answer. There’s many ways to use fasteners, tapping holes, brass insets, nuts can secure a design better than glue can.